機器手臂於中風患者居家復健的應用-喚起復元潛能
陳采愉、許絜翔、林宥岑、楊岡錦、徐秀雲、郭立杰
中風為突發性腦血管疾病,患者與其家屬們需共同面對漫長的復健歷程;然而,中風的黃金治療期為發病後3-6個月,在這之後進入慢性期,動作表現不易產生顯著的進步,整體功能也難以恢復到過去健康狀態時相同的水準。所以,除了加強在黃金治療期的復健,也有研究團隊開始將目標聚焦在黃金治療期過後,如何藉由創新的療法促進病人的能力,突破慢性期復原能力的限制。
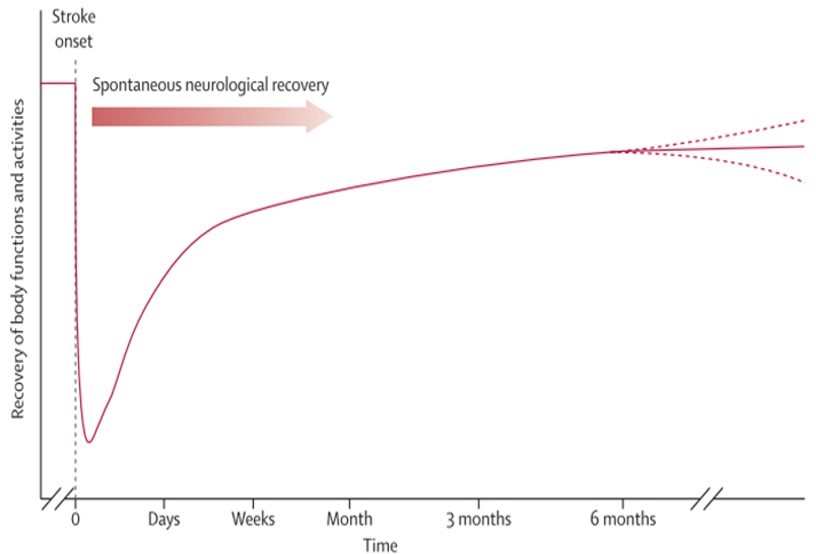
圖一、中風之後的身體功能恢復曲線(圖片引用自Langhorne, P., Bernhardt, J., & Kwakkel, G. (2011). Stroke rehabilitation. The Lancet, 377(9778), 1693-1702)
近年來,在中風復健融入機器手臂(robotic arm)的趨勢興起。機器手臂具有以下優勢:(1)馬達可提供大量的重複性動作,如此高強度的介入模式可活化大腦,促進動作神經恢復;(2)機器可以客觀、精準測量每個動作表現,長期使用下,有益於臨床人員確實掌握患者的復元進展;(3)機器手臂的力學設計符合人體關節排列,並做出自然的關節動作,可依據患者病情,打造出適用於不同部位的訓練菜單;(4)機器手臂安全、運作穩定,適合在不同治療環境下操作與訓練。機器手臂在醫院環境下的訓練成效也已獲得證實,為中風患者提供新的復健選擇。
中風過後大約一個月,患者就會出院並轉入門診復健,治療師也會評估病人需求,設計出個人化的居家訓練菜單,與醫院的治療情境相比,在家可以讓患者運用身邊容易取得的生活用品,並且在熟悉的環境下做復健。但是居家復健常常讓治療師無法確認實際上的訓練品質,除了不易掌握患者在家做的動作是否正確,也無從確保患者是否有確實達成訓練菜單上的要求。臨床上常透過電話訪問、填寫復健日誌來追蹤表現,但仍有許多改善空間。
為了提高復健品質的監督及效率,物聯網(Internet-of-Things)的科技開始應用於醫療領域中,物聯網可藉由雲端連結多個設備,將數據上傳到雲端並進行整合,把居家復健的輔具連線到雲端,臨床人員即可藉由雲端平台上的資料,及時監督患者在家的訓練情形。
因此,本研究團隊正在研發輕量型機器手臂的輔具以促進中風病人的上肢功能,並且將輔具連結物聯網,讓資料傳輸、監督與分析更為便利,期許這樣的設備可以改善慢性中風患者的復元能力,同時讓臨床人員可有效監督患者在家復健的訓練成效。
參考文獻
- Gradim, L. C. C., José, M. A., Cruz, D. M. C. d., & Lopes, R. d. D. (2020). IoT Services and Applications in Rehabilitation: An Interdisciplinary and Meta-Analysis Review. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(9), 2043-2052.
- Langhorne, P., Bernhardt, J., & Kwakkel, G. (2011). Stroke rehabilitation. The Lancet, 377(9778), 1693-1702.
- Molteni, F., Gasperini, G., Cannaviello, G., & Guanziroli, E. (2018). Exoskeleton and End-Effector Robots for Upper and Lower Limbs Rehabilitation: Narrative Review. Pm r, 10(9 Suppl 2), S174-s188.
- Subedi, N., Rawstorn, J. C., Gao, L., Koorts, H., & Maddison, R. (2020). Implementation of Telerehabilitation Interventions for the Self-Management of Cardiovascular Disease: Systematic Review. JMIR Mhealth Uhealth, 8(11), e17957.
- Terranova, T. T., Simis, M., Santos, A. C. A., Alfieri, F. M., Imamura, M., Fregni, F., & Battistella, L. R. (2021). Robot-Assisted Therapy and Constraint-Induced Movement Therapy for Motor Recovery in Stroke: Results From a Randomized Clinical Trial. Front Neurorobot, 15, 684019.
作者資訊
陳采愉 成大職能治療研究所 碩二生 (治療師)
許絜翔 成大職能治療學系 博士後研究員
林宥岑 大葉大學職能治療學系 助理教授
楊岡錦 成大前瞻醫療器材科中心 博士後研究員
徐秀雲 成大復健部 教授
郭立杰 成大職能治療學系 教授
