
研究顯示經過臨床實習或替代訓練媒介的年輕醫師,執行手術的併發症率可降低10倍。然而,作為替代式訓練的大體老師難以取得且無法大量複製,加上動物組織與器官在全球3R政策下逐年降低用量。有鑒於此,本團隊整合三大核心技術,包含(1).可模擬蛋白質組織特性的仿真雙網格人造材料(Biomimetic Dual-network Artificial Materials, BDAM),用於特定器官或組織的微創手術模擬,如熱消融的蛋白質變性、切割與縫合。此外,該材料也能建立仿真筋膜構造,用於微創手術的水分離術(Hydrodissection)練習。(2).互動式模擬人體循環系統(Interactive Mock Human Circulatory System, IMHCS),包含呼吸與血液循環功能,可用於模擬人體相對應的呼吸頻率與深度、血流速與血壓等。(3).內嵌式的軟性感測器 (Embedded Soft Inductive Sensors, ESIS)技術,有效將感測器內嵌於材料中,即時讀取材料溫度與阻抗的改變,於熱消融微創手術過程中對目標組織進行即時溫度監控。
如圖一所示,目前團隊基於上述三大技術已成功建立四大系統,(A).肝臟的腹腔微創手術訓練系統、(B).甲狀腺射頻消融微創手術訓練系統、(C).瓣膜性心臟微創手術訓練系統、(D).乳房切片微創手術訓練系統。其中,仿真假體是透過匯入臨床病患的醫療影像,經由Attention-Guided 3D Res-U-Net演算法,以AI方式分割關鍵區域並進行後續的3D模型重建,從而實現客製化假體製作,如圖二所示。目前上述系統皆已導入臨床訓練使用並持續優化中,這也顯示團隊技術可行性與未來商業應用發展潛力。團隊致力打造一系列醫療技能培訓平台,加速醫師掌握新手術技術的學習曲線,為台灣的精準醫療和微創手術培訓做出實質性的貢獻,也能提高臺灣在智慧醫療上的國際競爭力。
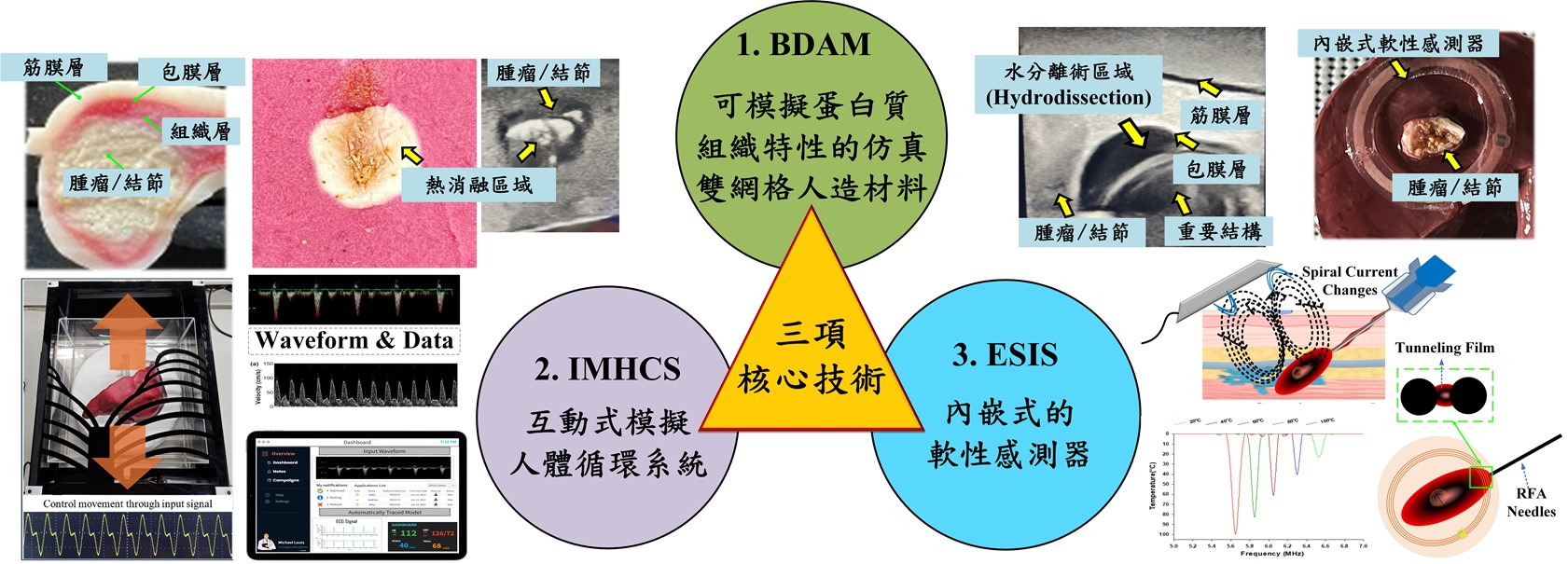
圖一、三大核心技術項目
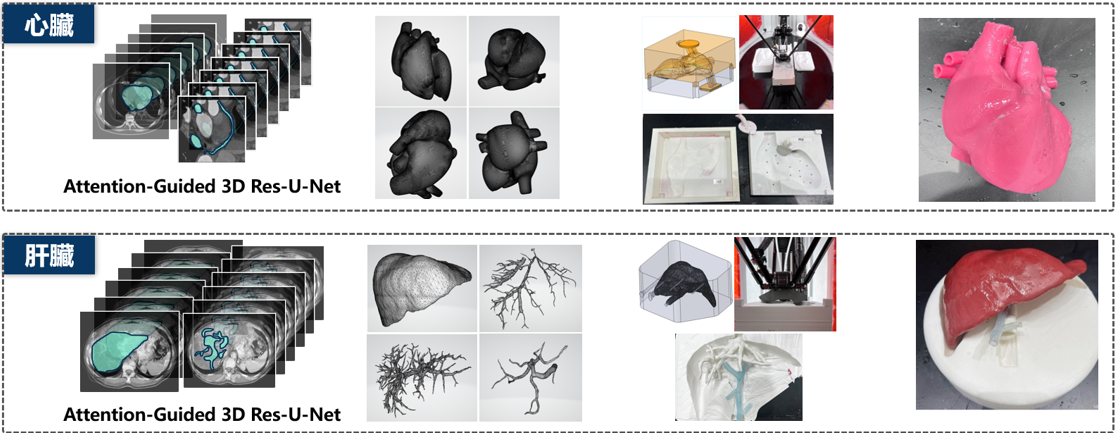
圖二、快速AI客製化假體製作技術 (以心臟 & 肝臟為例)
模擬組織受熱的蛋白質變性反應實驗結果顯示,假體經由RFA或MWA消融時,在工作溫度區間60~100℃時,假體會因受熱引發聚合反應,使熱消融區域之假體逐漸變硬且脫水乾固,並且在超音波影像上呈現高回聲回饋,呈現與真實組織含有蛋白質因受熱而變化的特性,實際目視熱消融區域碳化效果如圖三(a)所示。此外,臨床上,當手術部位靠近重要器官時,會使用生理食鹽水或5%葡萄糖水進行局部注射,將腫瘤或結節與重要器官暫時分隔避免熱損傷,稱為水分離術(Hydrodissection)。為模擬此術式,須還原人體筋膜層與包膜層結構。基於團隊開發的仿真BDAM材料,除了能呈現組織蛋白質高溫變性效果外,還 可針對不同病灶設計密度、硬度、阻抗值等參數。這樣的材料特性在本案中也被應用於製作一系列符合人體組織器官構造的筋膜與包膜層,使熱消融手術模擬可以支援臨床常用的Hydrodissection,並於醫學影像中清晰呈現,如圖三(b)所示。
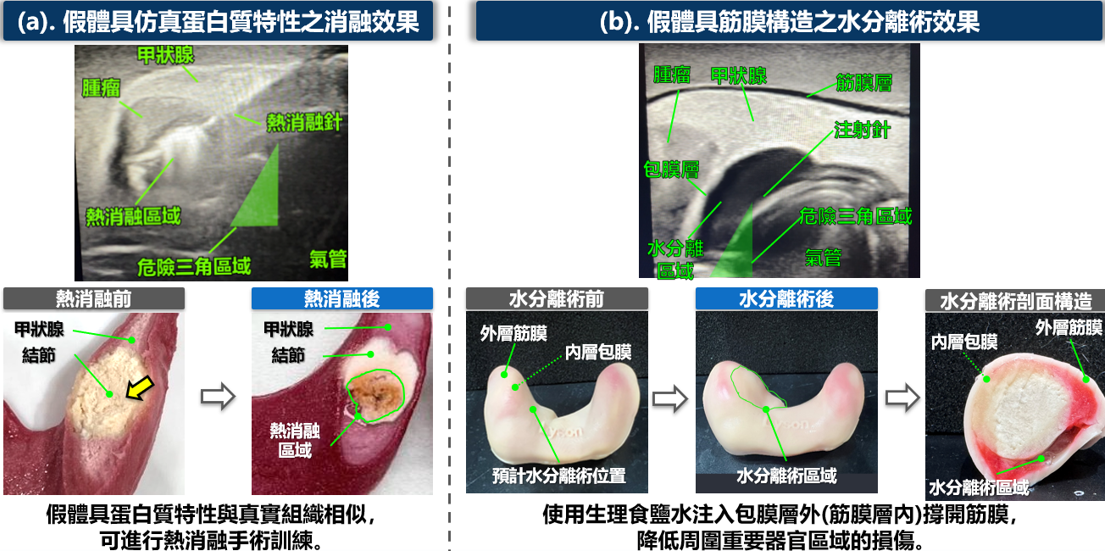
圖三、(a). 腫瘤假體經熱消融後之實際變化與超音波影像 ;
(b). 於假體還原人體組織器官構造的筋膜與包膜層特性,提供臨床進行Hydrodissection訓練
目前,團隊成功將一系列產品提供給醫院作為培訓、以及國際研討會做教學演練使用。根據使用者意見反饋結果顯示,這樣的高仿真假體手術手感與真實器官相近,且能夠真實還原組織蛋白質遇熱碳化反應;問卷(李克特氏五點量表, Likert scale)調查結果表明,使用者對於手術訓練系統的使用滿意度超過3分,展示了相關技術的可行性與商品化潛力。整體而言,團隊開發的多功能高仿真醫學假體,能模擬病灶組織蛋白質特性,建立高仿真的的熱消融手術訓練模擬環境,解決市售假體缺乏蛋白質模擬、無法熱消融、無筋膜構造等問題。該技術具新穎性、臨床可行性及商業發展潛力,為手術訓練提供突破性的解決方案。未來團隊將持續擴展技術並開發不同醫療科別手術訓練假體,幫助醫師加速學習新技術並降低併發症風險。
參考文獻
1.Yang, T. H., Du, Y. C., Xu, C. B., & Ciou, W. S. (2024). Development of a MR Training System for Living Donor Liver Transplantation Using Simulated Liver Phantom and ICP Tracking Technology. IEEE Transactions on Human-Machine Systems
2.Wu, M. J., Du, Y. C., Ciou, W. S., Shih, C. B., & Lin, C. T. (2021). A real-time rule-based method of stenosis evaluation for arteriovenous fistula care by multiple sites blood flow measurement. Microsystem Technologies, 27, 1283-1293.
3.Wang, K. J., Chen, C. H., Chen, J. J., Ciou, W. S., Xu, C. B., & Du, Y. C. (2021). An improved sensing method of a robotic ultrasound system for real-time force and angle calibration. Sensors, 21(9), 2927.
作者資訊
|
姓名 |
單位 |
職稱 |
電子信箱 |
|
|
1 |
杜翌群 |
國立成功大學 |
教授 |
terrydu@gs.ncku.edu.tw |
|
2 |
楊宗翰 |
國立成功大學 |
一般外科主治醫師兼臨床助理教授 |
p88101045@gs.ncku.edu.tw |
|
3 |
邱緯翔 |
國立成功大學前瞻醫療器材科技中心 |
博士後研究員 |
11006002@gs.ncku.edu.tw |